
Page 85 - Kaleidoscope Academic Conference Proceedings 2022
P. 85
Extended reality – How to boost quality of experience and interoperability
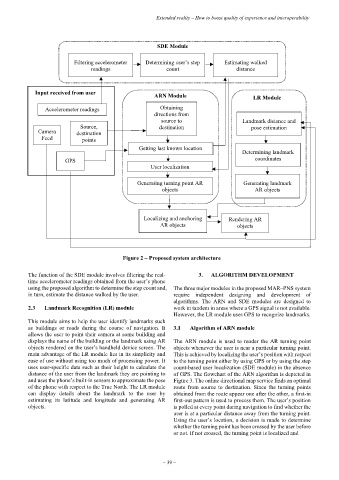
SDE Module
Filtering accelerometer Determining user’s step Estimating walked
readings count distance
Input received from user ARN Module LR Module
Accelerometer readings Obtaining
directions from
source to Landmark distance and
Source, destination pose estimation
Camera destination
Feed points
Getting last known location
Determining landmark
GPS coordinates
User localization
Generating turning point AR Generating landmark
objects AR objects
Localizing and anchoring Rendering AR
AR objects objects
Figure 2 – Proposed system architecture
The function of the SDE module involves filtering the real- 3. ALGORITHM DEVELOPMENT
time accelerometer readings obtained from the user’s phone
using the proposed algorithm to determine the step count and, The three major modules in the proposed MAR–PNS system
in turn, estimate the distance walked by the user. require independent designing and development of
algorithms. The ARN and SDE modules are designed to
2.3 Landmark Recognition (LR) module work in tandem in areas where a GPS signal is not available.
However, the LR module uses GPS to recognize landmarks.
This module aims to help the user identify landmarks such
as buildings or roads during the course of navigation. It 3.1 Algorithm of ARN module
allows the user to point their camera at some building and
displays the name of the building or the landmark using AR The ARN module is used to render the AR turning point
objects rendered on the user’s handheld device screen. The objects whenever the user is near a particular turning point.
main advantage of the LR module lies in its simplicity and This is achieved by localizing the user’s position with respect
ease of use without using too much of processing power. It to the turning point either by using GPS or by using the step
uses user-specific data such as their height to calculate the count-based user localization (SDE module) in the absence
distance of the user from the landmark they are pointing to of GPS. The flowchart of the ARN algorithm is depicted in
and uses the phone’s built-in sensors to approximate the pose Figure 3. The online directional map service finds an optimal
of the phone with respect to the True North. The LR module route from source to destination. Since the turning points
can display details about the landmark to the user by obtained from the route appear one after the other, a first-in
estimating its latitude and longitude and generating AR first-out pattern is used to process them. The user’s position
objects. is polled at every point during navigation to find whether the
user is at a particular distance away from the turning point.
Using the user’s location, a decision is made to determine
whether the turning point has been crossed by the user before
or not. If not crossed, the turning point is localized and
– 39 –