
Page 86 - Kaleidoscope Academic Conference Proceedings 2022
P. 86
2022 ITU Kaleidoscope Academic Conference
Start raw accelerometer data is obtained in three axes namely X,
Y and Z. After each foot-step detection, the cumulative count
is multiplied by the foot-stride length of the user to obtain
Obtain source, destination locations distance covered by the user. The foot-stride length of the
user is obtained by performing initial calibration tests which
involve the user walking a certain distance. This calibration
Get turning point locations test is described by the gait calibration algorithm (Algorithm
1). The gait calibration algorithm is performed in the
beginning when the user launches the navigation module for
Poll user’s location either by GPS or step the first time.
count distance estimator
3.2 Algorithm of LR module
No Is The landmark recognition algorithm (Algorithm 2) used in
the LR module aims to assist the user in discovering
user d meters Yes landmarks such as buildings or other objects whose
away from location/identity is unknown to them. The working of this
turn? algorithm involves using the user’s height, the current
Is turning location of the user and the bearing of the user’s phone (i.e.)
point seen azimuth. The user has to point their phone at the base of the
Yes before? building/object to obtain the details of the landmark. The
method uses a trigonometric tangent function to obtain the
distance of the user from the base of the landmark given the
No user’s phone’s height (approximated from the user’s height)
and the angle of inclination of the user’s phone (obtained
Defer existing Localize and render from sensors) [12]. Using the approximated distance, current
AR turning AR turning point location of the user and the azimuth, the location of the
point
landmark is estimated using the inverse haversine formula
[13]. Upon getting the location of the landmark, its details
are obtained using the online digital mapping service and
displayed to the user using the AR renderer.
Reached No
destination? Algorithm 1 - Gait calibration algorithm
Input – User’s current location, Phone’s GPS
Yes Output – User’s foot-stride length
End 1. Initialize start location as user’s current location
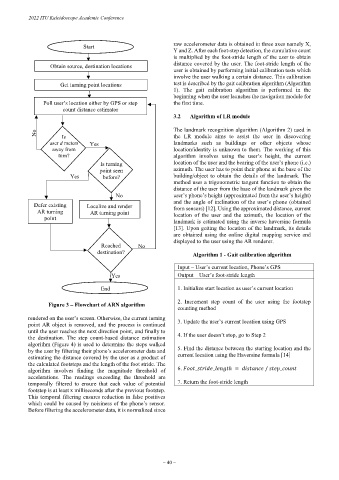
Figure 3 – Flowchart of ARN algorithm 2. Increment step count of the user using the footstep
counting method
rendered on the user’s screen. Otherwise, the current turning 3. Update the user’s current location using GPS
point AR object is removed, and the process is continued
until the user reaches the next direction point, and finally to
the destination. The step count-based distance estimation 4. If the user doesn’t stop, go to Step 2
algorithm (Figure 4) is used to determine the steps walked
by the user by filtering their phone’s accelerometer data and 5. Find the distance between the starting location and the
estimating the distance covered by the user as a product of current location using the Haversine formula [14]
the calculated footsteps and the length of the foot stride. The
algorithm involves finding the magnitude threshold of 6. _ _ ℎ = / _
accelerations. The readings exceeding the threshold are
temporally filtered to ensure that each value of potential 7. Return the foot-stride length
footstep is at least x milliseconds after the previous footstep.
This temporal filtering ensures reduction in false positives
which could be caused by noisiness of the phone’s sensor.
Before filtering the accelerometer data, it is normalized since
– 40 –