
Page 53 - ITU Journal Future and evolving technologies Volume 2 (2021), Issue 5 – Internet of Everything
P. 53
ITU Journal on Future and Evolving Technologies, Volume 2 (2021), Issue 5
Section 4 discusses an image data preprocessing step
x[i] n[i] Gaussian and the CNN‑based classi ier used in this work.
UAV Training + + noise Experimental results and relevant discussions are
Database s[i]
presented in Section 5. Finally, the paper is concluded in
Section 6.
Data
Capture
Create time- Compute
series images spectrograms
2. LITERATURE REVIEW AND CONTRIBU‑
non-UAV
Model Training Phase Various approaches have been proposed in the litera‑
signal Convert to denoising TIONS
Apply
greyscale
Multiusage ture for the detection and classi ication of drones. In Ta‑
Detection Crop
System [26] Images ble 1, we summarize the related literature on drone de‑
tection and classi ication with some representative work
UAV
signal and emphasis on the number of UAVs considered, clas‑
Trained Model Model use the term detection as a special case of classi ication
si ication accuracy, and noise considerations. Here we
Best
CNN
that has only two classes (i.e., UAV/non‑UAV). Techniques
used to achieve these tasks can be categorized based
on the type of data being captured (e.g., radar signals,
UAV drone or controller Radio Frequency (RF) signals, acous‑
Controller ID
tic data, or camera images), features extracted from the
data (e.g., RF ingerprints, spectrogram images), and the
Machine Learning (ML) algorithms deployed for classi‑
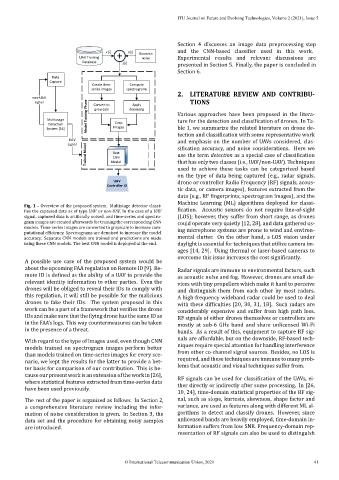
Fig. 1 – Overview of the proposed system. Multistage detector classi‑
ies the captured data as of type UAV or non‑UAV. In the case of a UAV ication. Acoustic sensors do not require line‑of‑sight
signal, captured data is arti icially noised, and time‑series and spectro‑ (LOS); however, they suffer from short range, as drones
gram images are created afterwards for training the corresponding CNN could operate very quietly [12, 28], and data gathered us‑
models. Time‑series images are converted to grayscale to increase com‑ ing microphone systems are prone to wind and environ‑
putational ef iciency. Spectrograms are denoised to increase the model
accuracy. Separate CNN models are trained and predictions are made mental clutter. On the other hand, a LOS vision under
using these CNN models. The best CNN model is deployed at the end. daylight is essential for techniques that utilize camera im‑
ages [14, 29]. Using thermal or laser‑based cameras to
overcome this issue increases the cost signi icantly.
A possible use case of the proposed system would be
about the upcoming FAA regulation on Remote ID [9]. Re‑ Radar signals are immune to environmental factors, such
mote ID is de ined as the ability of a UAV to provide the as acoustic noise and fog. However, drones are small de‑
relevant identity information to other parties. Even the vices with tiny propellers which make it hard to perceive
drones will be obliged to reveal their IDs to comply with and distinguish them from each other by most radars.
this regulation, it will still be possible for the malicious A high‑frequency wideband radar could be used to deal
drones to fake their IDs. The system proposed in this with these dif iculties [20, 30, 31, 18]. Such radars are
work can be a part of a framework that veri ies the drone considerably expensive and suffer from high path loss.
IDs and make sure that the lying drone has the same ID as RF signals of either drones themselves or controllers are
in the FAA’s logs. This way countermeasures can be taken mostly at sub‑6 GHz band and share unlicensed Wi‑Fi
in the presence of a threat. bands. As a result of this, equipment to capture RF sig‑
nals are affordable, but on the downside, RF‑based tech‑
With regard to the type of images used, even though CNN
niques require special attention for handling interference
models trained on spectrogram images perform better
from other co‑channel signal sources. Besides, no LOS is
than models trained on time‑series images for every sce‑
required, andthese techniquesareimmunetomanyprob‑
nario, we kept the results for the latter to provide a bet‑
lems that acoustic and visual techniques suffer from.
ter basis for comparison of our contribution. This is be‑
cause our present work is an extension of the work in [26],
RF signals can be used for classi ication of the UAVs, ei‑
where statistical features extracted from time‑series data ther directly or indirectly after some processing. In [26,
have been used previously.
10, 24], time‑domain statistical properties of the RF sig‑
The rest of the paper is organized as follows. In Section 2, nal, such as slope, kurtosis, skewness, shape factor and
a comprehensive literature review including the infor‑ variance, are used as features along with different ML al‑
mation of noise consideration is given. In Section 3, the gorithms to detect and classify drones. However, since
data set and the procedure for obtaining noisy samples unlicensed bands are heavily employed, time‑domain in‑
are introduced. formation suffers from low SNR. Frequency‑domain rep‑
resentation of RF signals can also be used to distinguish
© International Telecommunication Union, 2021 41