
Page 106 - Kaleidoscope Academic Conference Proceedings 2021
P. 106
2021 ITU Kaleidoscope Academic Conference
4.3 Response time evaluation
The developed application is executed in an android
smartphone (Redmi Note 8) with 4GB RAM and
Snapdragon 665 Processor with 6.30 inch display. When the
app gets deployed, the corresponding deployment time of the
model gets generated in a CSV file at runtime. Table 1 shows
the mean response time obtained from three different spatial
locations before and after applying the SLAM algorithm.
SLAM does instant tracking of feature points (point clouds)
by dynamically updating the three-dimensional feature
(a) Top view (b) Side view (c) Front view points.
Figure 6 – Multi-perspective view of home interior models
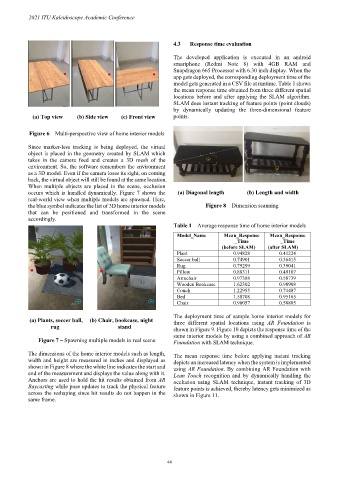
Since marker-less tracking is being deployed, the virtual
object is placed in the geometry created by SLAM which
takes in the camera feed and creates a 3D mesh of the
environment. So, the software remembers the environment
as a 3D model. Even if the camera loses its sight, on coming
back, the virtual object will still be found at the same location.
When multiple objects are placed in the scene, occlusion
occurs which is handled dynamically. Figure 7 shows the (a) Diagonal length (b) Length and width
real-world view when multiple models are spawned. Here,
the blue symbol indicates the list of 3D home interior models Figure 8 – Dimension scanning
that can be positioned and transformed in the scene
accordingly.
Table 1 – Average response time of home interior models
Model_Name Mean_Response Mean_Response
_Time _Time
(before SLAM) (after SLAM)
Plant 0.94828 0.41224
Soccer ball 0.74901 0.36415
Rug 0.79299 0.39041
Pillow 0.88311 0.49107
Armchair 0.97388 0.58739
Wooden Bookcase 1.62302 0.98908
Couch 1.22955 0.74487
Bed 1.58708 0.95165
Chair 0.90057 0.58805
The deployment time of sample home interior models for
(a) Plants, soccer ball, (b) Chair, bookcase, night three different spatial locations using AR Foundation is
rug stand shown in Figure 9. Figure 10 depicts the response time of the
same interior models by using a combined approach of AR
Figure 7 – Spawning multiple models in real scene Foundation with SLAM technique.
The dimensions of the home interior models such as length, The mean response time before applying instant tracking
width and height are measured in inches and displayed as depicts an increased latency when the system is implemented
shown in Figure 8 where the white line indicates the start and using AR Foundation. By combining AR Foundation with
end of the measurement and displays the value along with it. Lean Touch recognition and by dynamically handling the
Anchors are used to hold the hit results obtained from AR occlusion using SLAM technique, instant tracking of 3D
Raycasting while pose updates to track the physical feature feature points is achieved, thereby latency gets minimized as
across the reshaping since hit results do not happen in the shown in Figure 11.
same frame.
– 44 –