
Page 127 - ITU KALEIDOSCOPE, ATLANTA 2019
P. 127
ICT for Health: Networks, standards and innovation
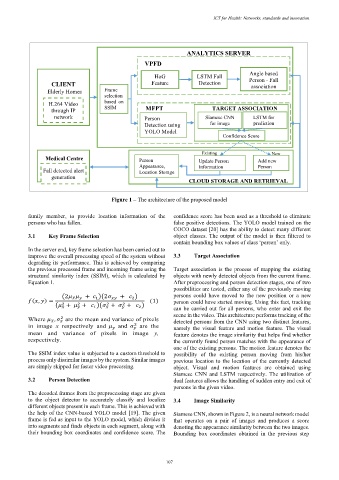
ANALYTICS SERVER
VPFD
HoG LSTM Fall Angle based
CLIENT Feature Detection Person - Fall
association
Elderly Homes Frame Extraction
selection
H.264 Video based on
SSIM
through IP MFPT TARGET ASSOCIATION
network Person Siamese CNN LSTM for
Detection using for image prediction
YOLO Model similarity
Confidence Score
Existing New
Medical Centre Person Update Person Add new
Appearance, Information Person
Fall detected alert Location Storage
generation
CLOUD STORAGE AND RETRIEVAL
Figure 1 – The architecture of the proposed model
family member, to provide location information of the confidence score has been used as a threshold to eliminate
persons who has fallen. false positive detections. The YOLO model trained on the
COCO dataset [20] has the ability to detect many different
3.1 Key Frame Selection object classes. The output of the model is then filtered to
contain bounding box values of class ‘person’ only.
In the server end, key frame selection has been carried out to
improve the overall processing speed of the system without 3.3 Target Association
degrading its performance. This is achieved by comparing
the previous processed frame and incoming frame using the Target association is the process of mapping the existing
structural similarity index (SSIM), which is calculated by objects with newly detected objects from the current frame.
Equation 1. After preprocessing and person detection stages, one of two
possibilities are tested, either any of the previously moving
(2 + )(2 + ) persons could have moved to the new position or a new
1
2
( , ) = (1) person could have started moving. Using this fact, tracking
2
2
2
2
( + + )( + + ) can be carried out for all persons, who enter and exit the
2
1
scene in the video. This architecture performs tracking of the
Where , are the mean and variance of pixels detected persons from the CNN using two distinct features,
2
in image x respectively and and are the namely the visual feature and motion feature. The visual
2
mean and variance of pixels in image y, feature denotes the image similarity that helps find whether
respectively. the currently found person matches with the appearance of
one of the existing persons. The motion feature denotes the
The SSIM index value is subjected to a custom threshold to possibility of the existing person moving from his/her
process only dissimilar images by the system. Similar images previous location to the location of the currently detected
are simply skipped for faster video processing. object. Visual and motion features are obtained using
Siamese CNN and LSTM respectively. The utilization of
3.2 Person Detection dual features allows the handling of sudden entry and exit of
persons in the given video.
The decoded frames from the preprocessing stage are given
to the object detector to accurately classify and localize 3.4 Image Similarity
different objects present in each frame. This is achieved with
the help of the CNN-based YOLO model [19]. The given Siamese CNN, shown in Figure 2, is a neural network model
frame is fed as input to the YOLO model, which divides it that operates on a pair of images and produces a score
into segments and finds objects in each segment, along with denoting the appearance similarity between the two images.
their bounding box coordinates and confidence score. The Bounding box coordinates obtained in the previous step
– 107 –