
Page 105 - Kaleidoscope Academic Conference Proceedings 2024
P. 105
Innovation and Digital Transformation for a Sustainable World
perform the matrix multiplication algorithm. This involves GPU’s streaming multiprocessors(SMs). Once the matrices
a combination of arithmetic operations(e.g., Addition and are loaded into GPU memory and the matrix multiplication
Multiplication) and data movement instructions. Once the kernel is working, the kernel is launched from the CPU.
matrix multiplication is complete, the result matrix is stored This initiates parallel execution of the matrix multiplication
back into CPU registers. Depending on the application’s operation on the GPU. The number of threads per block
requirements, the results may need to be written back to and the number of blocks per grid are determined based
RAM. This involves a similar process to loading data from on the size of the matrix and the GPU’s architecture to
RAM, where the CPU’s cache hierarchy is utilized to manage achieve optimal parallelism. Each thread block is scheduled
data movement efficiently. For these operations, we use the onto an SM for execution. Within each SM, multiple
PYTHON library(numpy). thread blocks can be processed concurrently, with each
block utilizing the SM’s resources efficiently, The CUDA
runtime manages the scheduling and execution of thread
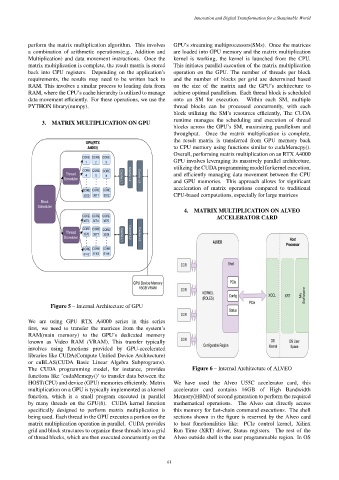
3. MATRIX MULTIPLICATION ON GPU
blocks across the GPU’s SM, maximizing parallelism and
throughput. Once the matrix multiplication is complete,
the result matrix is transferred from GPU memory back
to CPU memory using functions similar to cudaMemcpy().
Overall, performing matrix multiplication on an RTX A4000
GPU involves leveraging its massively parallel architecture,
utilizing the CUDA programming model for kernel execution,
and efficiently managing data movement between the CPU
and GPU memories. This approach allows for significant
acceleration of matrix operations compared to traditional
CPU-based computations, especially for large matrices
4. MATRIX MULTIPLICATION ON ALVEO
ACCELERATOR CARD
Figure 5 – Internal Architecture of GPU
We are using GPU RTX A4000 series in this series
first, we need to transfer the matrices from the system’s
RAM(main memory) to the GPU’s dedicated memory
known as Video RAM (VRAM). This transfer typically
involves using functions provided by GPU-accelerated
libraries like CUDA(Compute Unified Device Architecture)
or cuBLAS(CUDA Basic Linear Algebra Subprograms).
The CUDA programming model, for instance, provides Figure 6 – Internal Architecture of ALVEO
functions like ’cudaMemcpy()’ to transfer data between the
HOST(CPU) and device (GPU) memories efficiently. Matrix We have used the Alveo U55C accelerator card, this
multiplication on a GPU is typically implemented as a kernel accelerator card contains 16GB of High Bandwidth
function, which is a small program executed in parallel Memory(HBM) of second generation to perform the required
by many threads on the GPU(6). CUDA kernel function mathematical operations. The Alveo can directly access
specifically designed to perform matrix multiplication is this memory for fast-chain command executions. The shell
being used. Each thread in the GPU executes a portion on the sections shown in the figure is reserved by the Alveo card
matrix multiplication operation in parallel. CUDA provides to host functionalities like: PCIe control kernel, Xilinx
grid and block structures to organize these threads into a grid Run Time (XRT) driver, Status registers. The rest of the
of thread blocks, which are then executed concurrently on the Alveo outside shell is the user programmable region. In OS
– 61 –