
Page 164 - ITU-T Focus Group IMT-2020 Deliverables
P. 164
3 ITU-T Focus Group IMT-2020 Deliverables
FLARE Switch
FLARE Slice 1 (c-plane) FLARE Slice 2 (C-plane)
FLARE Slice 2 (c-plane)
docker docker docker docker
MME HSS MME HSS
SP-GW SP-GW
(c-plane) (c-plane)
PCI
Southbound Southbound
API API
Signaling
FLARE Slice 1 FLARE Slice 2
(d-plane) (d-plane)
SP-GW SP-GW
(d-plane) (d-plane)
Slicer slice
eNB Data PDN
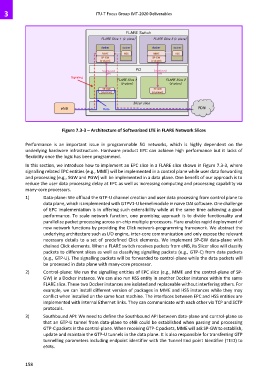
Figure 7.3-3 – Architecture of Softwarized LTE in FLARE Network Slices
Performance is an important issue in programmable 5G networks, which is highly dependent on the
underlying hardware infrastructure. Hardware product EPC can achieve high performance but it lacks of
flexibility once the logic has been programmed.
In this section, we introduce how to implement an EPC slice in a FLARE slice shown in Figure 7.3-3, where
signalling related EPC entities (e.g., MME) will be implemented in a control plane while user data forwarding
and processing (e.g., SGW and PGW) will be implemented in a data plane. One benefit of our approach is to
reduce the user data processing delay at EPC as well as increasing computing and processing capability via
many-core processors.
1) Data-plane: We offload the GTP-U channel creation and user data processing from control plane to
data plane, which is implemented with GTPV1-U kernel module in naïve OAI software. One challenge
of EPC implementation is in offering such extensibility while at the same time achieving a good
performance. To scale network function, one promising approach is to divide functionality and
parallelize packet processing across on-chip multiple processors. Flare enables rapid deployment of
new network functions by providing the Click network-programming framework. We abstract the
underlying architecture such as I/O engine, inter-core communication and only expose the relevant
necessary details to a set of predefined Click elements. We implement SP-GW data-plane with
chained Click elements. When a FLARE switch receives packets from eNB, its Slicer slice will classify
packets to different slices as well as classifying signalling packets (e.g., GTP-C) from data packets
(e.g., GTP-U). The signalling packets will be forwarded to control-plane while the data packets will
be processed in data plane with many-core processor.
2) Control-plane: We run the signalling entities of EPC slice (e.g., MME and the control-plane of SP-
GW) in a Docker instance. We can also run HSS entity in another Docker instance within the same
FLARE slice. These two Docker instances are isolated and replaceable without interfering others. For
example, we can install different version of packages in MME and HSS instances while they may
conflict when installed on the same host machine. The interfaces between EPC and HSS entities are
implemented with internal Ethernet links. They can communicate with each other via TCP and SCTP
protocols.
3) Southbound API: We need to define the Southbound API between data-plane and control-plane so
that an GTP-U tunnel from data-plane to eNB could be established when parsing and processing
GTP-C packets in the control-plane. When receiving GTP-C packets, MME will ask SP-GW to establish,
update and maintain the GTP-U tunnels in the data plane. It is also responsible for transferring GTP
tunnelling parameters including endpoint identifier with the Tunnel End point Identifier (TEID) to
eNBs.
158