
Page 52 - Kaleidoscope Academic Conference Proceedings 2020
P. 52
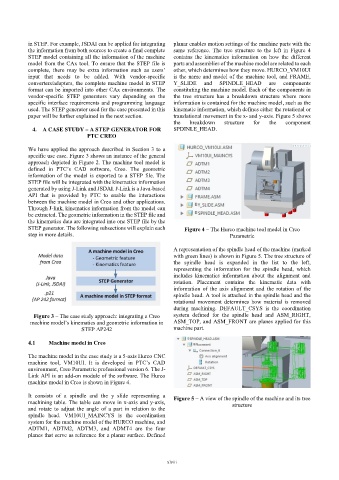
in STEP. For example, JSDAI can be applied for integrating planar enables motion settings of the machine parts with the
the information from both sources to create a final complete same reference. The tree structure to the left in Figure 4
STEP model containing all the information of the machine contains the kinematics information on how the different
model from the CAx tool. To ensure that the STEP file is parts and assemblies of the machine model are related to each
complete, there may be extra information such as users’ other, which determines how they move. HURCO_VM10UI
input that needs to be added. With vendor-specific is the name and model of the machine tool, and FRAME,
converters/adapters, the complete machine model in STEP Y_SLIDE and SPINDLE_HEAD are components
format can be imported into other CAx environments. The constituting the machine model. Each of the components in
vendor-specific STEP generators vary depending on the the tree structure has a breakdown structure where more
specific interface requirements and programming language information is contained for the machine model, such as the
used. The STEP generator used for the case presented in this kinematic information, which defines either the rotational or
paper will be further explained in the next section. translational movement in the x- and y-axis. Figure 5 shows
the breakdown structure for the component
4. A CASE STUDY – A STEP GENERATOR FOR SPDINLE_HEAD.
PTC CREO
We have applied the approach described in Section 3 to a
specific use case. Figure 3 shows an instance of the general
approach depicted in Figure 2. The machine tool model is
defined in PTC’s CAD software, Creo. The geometric
information of the model is exported to a STEP file. The
STEP file will be integrated with the kinematics information
generated by using J-Link and JSDAI. J-Link is a Java-based
API that is provided by PTC to enable the interactions
between the machine model in Creo and other applications.
Through J-link, kinematics information from the model can
be extracted. The geometric information in the STEP file and
the kinematics data are integrated into one STEP file by the
STEP generator. The following subsections will explain each Figure 4 – The Hurco machine tool model in Creo
step in more details. Parametric
A representation of the spindle head of the machine (marked
with green lines) is shown in Figure 5. The tree structure of
the spindle head is expanded in the list to the left,
representing the information for the spindle head, which
includes kinematics information about the alignment and
rotation. Placement contains the kinematic data with
information of the axis alignment and the rotation of the
spindle head. A tool is attached in the spindle head and the
rotational movement determines how material is removed
during machining. DEFAULT_CSYS is the coordination
Figure 3 – The case study approach: integrating a Creo system defined for the spindle head and ASM_RIGHT,
machine model’s kinematics and geometric information in ASM_TOP, and ASM_FRONT are planes applied for this
STEP AP242 machine part.
4.1 Machine model in Creo
The machine model in the case study is a 5-axis Hurco CNC
machine tool, VM10UI. It is developed in PTC’s CAD
environment, Creo Parametric professional version 6. The J-
Link API is an add-on module of the software. The Hurco
machine model in Creo is shown in Figure 4.
It consists of a spindle and the y slide representing a Figure 5 – A view of the spindle of the machine and its tree
machining table. The table can move in x-axis and y-axis, structure
and rotate to adjust the angle of a part in relation to the
spindle head. VM10UI_MAINCYS is the coordination
system for the machine model of the HURCO machine, and
ADTM1, ADTM2, ADTM3, and ADMT4 are the four
planes that serve as reference for a planar surface. Defined
– xlviii –